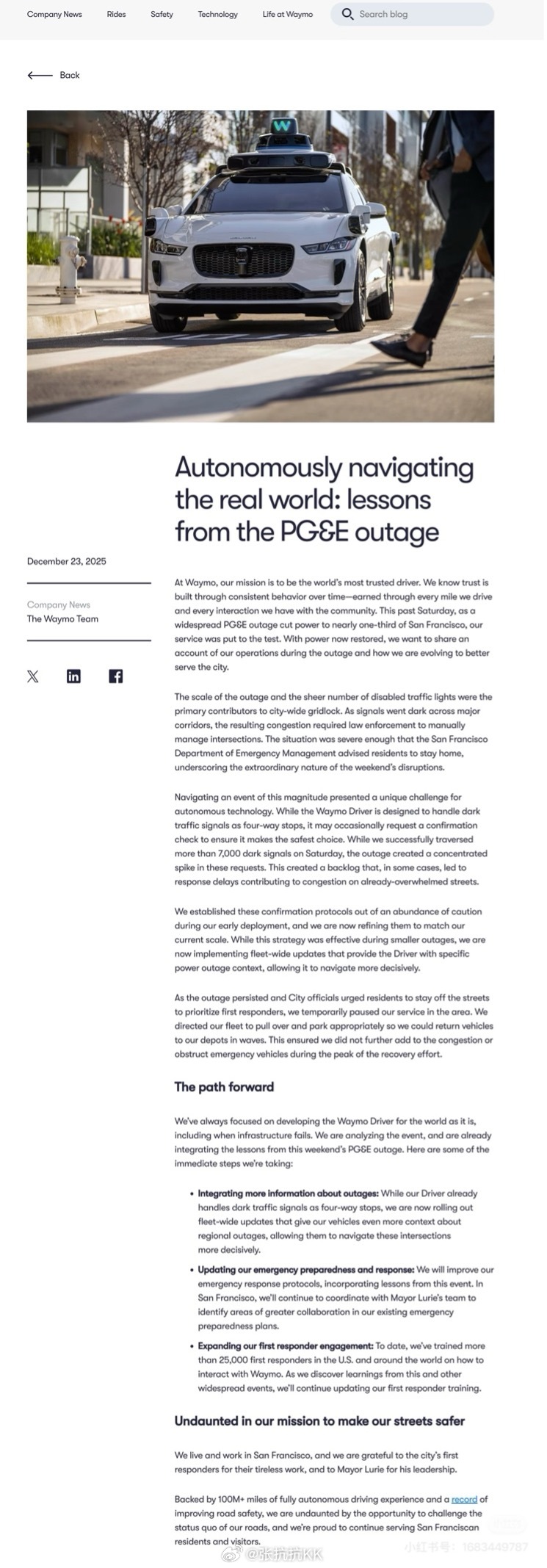
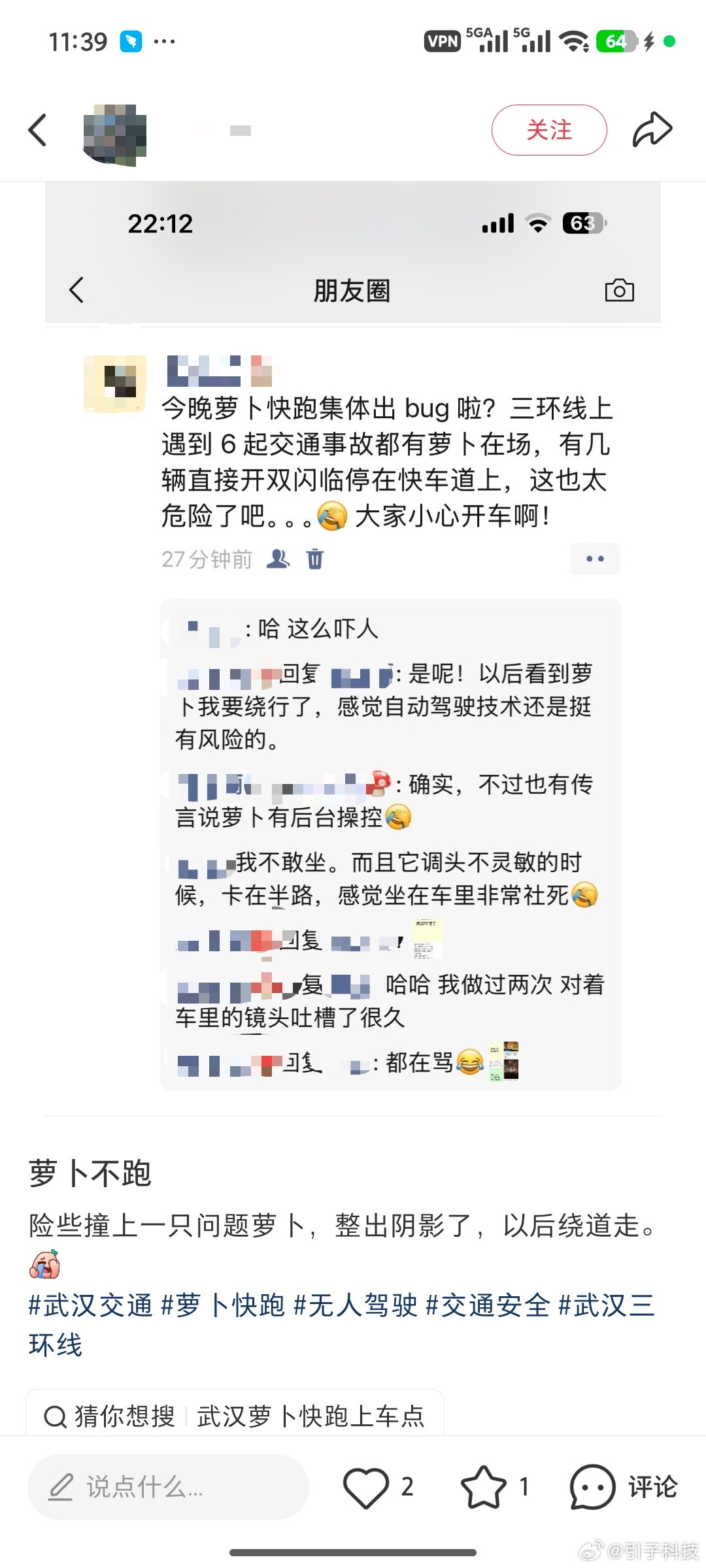
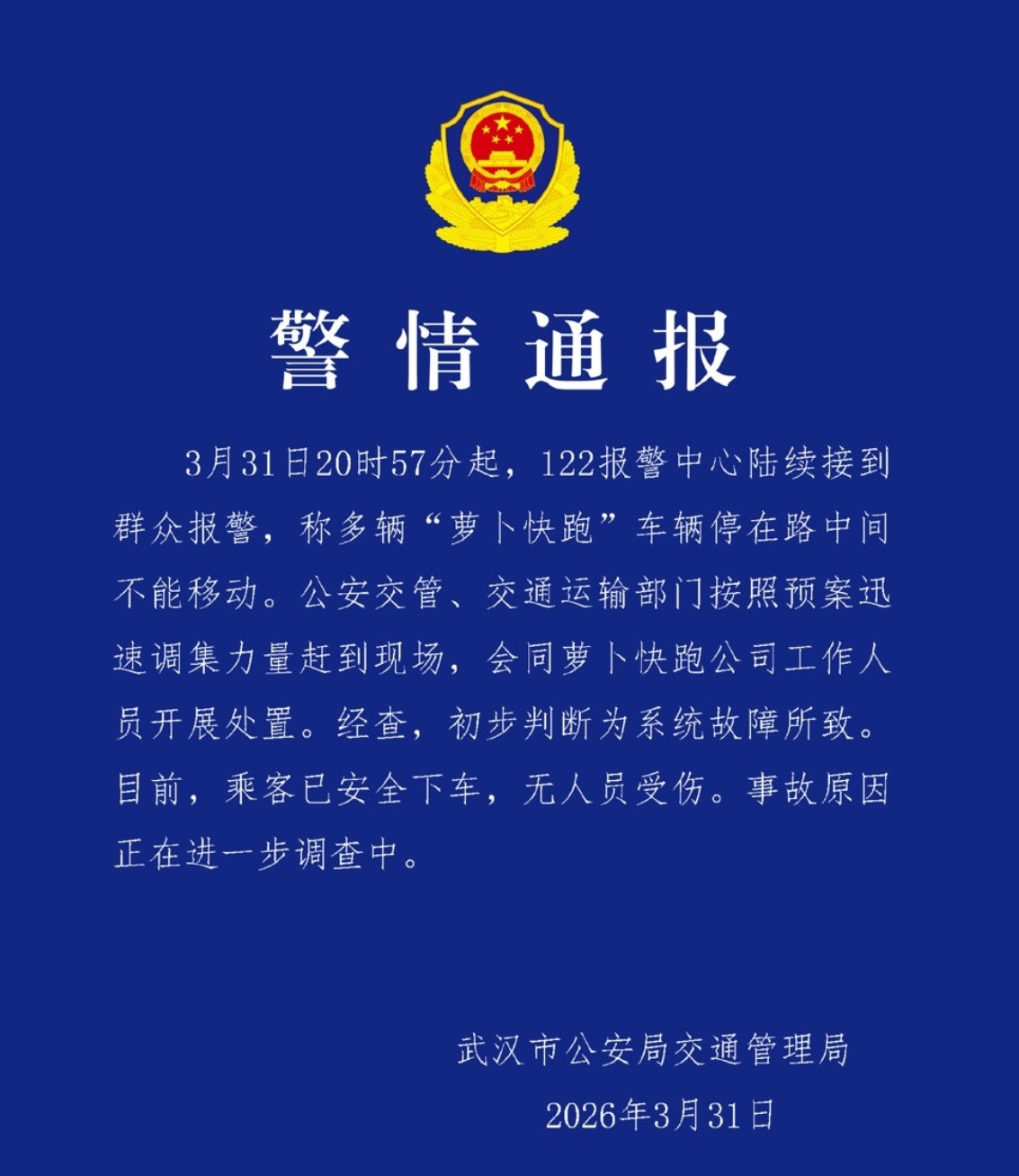
昨天晚上,武汉的萝卜快跑出现停滞运行的情况,这让人联想起4个月前的美国,2025年12月20日美国旧金山发生全城大规模停电,红绿灯全灭,数十台 Waymo 无人车在路口集体停驶、打开双闪。
你要说它的策略,似乎也有合理之处 —— 有红绿灯的路口看不到绿灯,那可不是遇到了重大意外情况,打开双闪等待人类处理,从安全角度是没问题的。
只不过,从人类的角度来看,这思路也太死板了,不够智能。这也是事实,目前的L4无人驾驶依然是开车智能,远远未达到通用智能的程度。
这类事件,我觉得要从两个角度来看。
一是从功能安全的角度。我之前是做功能安全的,在其它部门看来,我们这个部门的思路有点奇怪 —— 动不动就要求车辆“靠边停下即为安全”。
比如说,开车过程中突然发现电机扭矩不正常了,本来应该出100Nm的力,结果它出了150Nm,明显偏大。如此一来,就有可能出现“非预期扭矩”,让用户产生一种车要飞起来的感觉,这是极为危险的情况。
那怎么处理呢? 人类的正常思路,是不是应该赶紧检查电机问题,让“电机扭矩恢复正常”?
我们功能安全部门的思路不一样: 电机扭矩不正常,可能出现了短时间难以确认的、极为严重的问题,可能会危害人身安全和公共安全 —— 所以请立即给电机断电,让电机无法工作,并保证转向系统、制动系统正常,提醒驾驶员赶紧靠边停车。
这就类似于,西毒欧阳峰一个暗器打到了你的左胳膊上,神医说别急,我给你诊断一下;功能安全专家则说,你恐怕小命不保,请立刻切掉你的左胳膊并逃离现场,后续我再找个胳膊给你接上,这是最安全的做法。
是有点奇怪,但功能安全思路,确实是确保人身安全和公共安全的最有效的方法。回到萝卜快跑和waymo的两次事件,停车加双闪,就和中毒后切掉胳膊是一样的 ——
先不管原有功能是否正常,重点是先确保公共安全,因为L4无人驾驶这种技术,最怕的就是大规模的公共安全问题。试想一下,如果贸然行驶发生了公共的伤亡,那和现在的后果比,是不是太严重了!
到这里,就可以引出第二个角度:L3自动驾驶就快要进入乘用车领域,技术发展过程中也难免遇到这样那样的问题,将来还是会产生话题争议。那时候我们还是要考虑,应该怎么去理解一个技术的安全处理措施,应该以什么样的态度去指责或包容一个新技术。
如果对L3自动驾驶技术的车型感兴趣,那就可以提前想想这个话题了。
我的想法还是,新技术发展过程中遇到问题,一切按规则办事,权责明晰。就比如说功能安全的角度,就可以有明确定义:城市道路上,立刻停车即为安全; 高速或高架上,靠边停车即为安全;做到了就不用担责。