在科技发展的浪潮中,人形机器人正从科幻走向现实,迎来大规模量产的前夕。这一划时代的技术变革,蕴含着巨大的投资机遇,尤其在人形机器人的核心环节,如丝杠、谐波减速器、电机、灵巧手等关键零部件领域,相关上市公司正蓄势待发,有望在产业链爆发中占据重要地位。
一、丝杠——直线运动的核心精密部件
丝杠作为人形机器人直线运动的执行机构,其精度、承载能力和使用寿命对机器人的性能起着关键作用。其中,行星滚柱丝杠因其独特的结构和性能优势,成为人形机器人的核心部件之一。以特斯拉人形机器人为例,全身共配备14个线性执行器,若按照百万台量产规模计算,丝杠的市场规模将高达140亿元。
丝杠的生产技术壁垒较高,主要体现在材料、工艺和设备三个方面。国内厂商与海外同行的差距明显,但部分企业已开始奋起直追。上市公司布局情况:
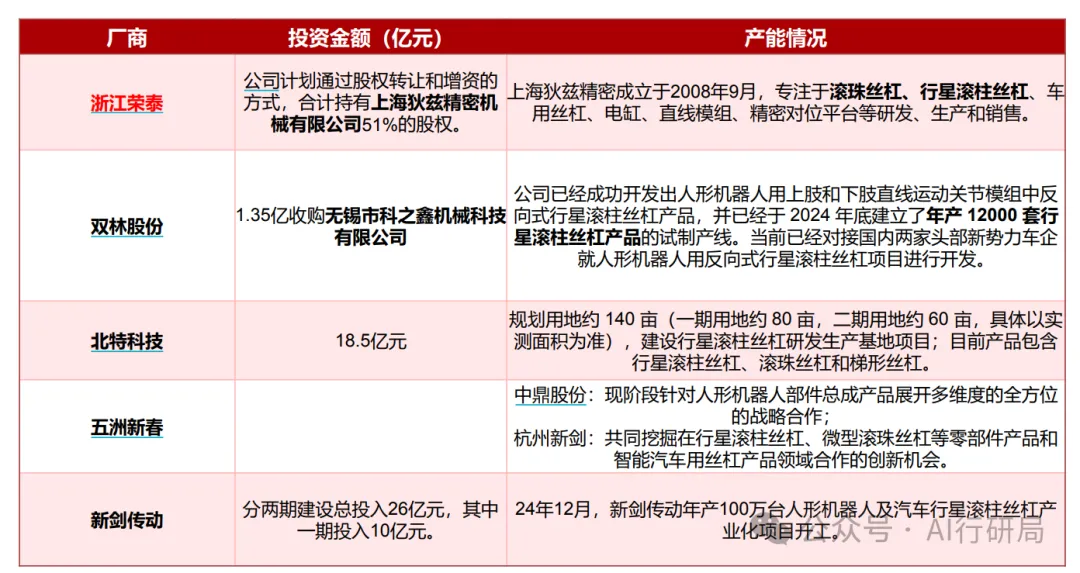
浙江荣泰:通过收购上海狄兹精密布局行星滚柱丝杠。
双林股份:已经成功开发出人形机器人用上肢和下肢直线运动关节模组中反向式行星滚柱丝杠产品,并已经于 2024 年底建立了年产 12000 套行星滚柱丝杠产品的试制产线。当前已经对接国内两家头部新势力车企就人形机器人用反向式行星滚柱丝杠项目进行开发。
北特科技:规划用地约140亩,建设行星滚柱丝杠研发生产基地项目;目前产品包含行星滚柱丝杠、滚珠丝杠和梯形丝杠。
五洲新春:与中鼎股份针对人形机器人部件总成产品展开多维度的全方位的战略合作;与杭州新剑共同挖掘在行星滚柱丝杠、微型滚珠丝杠等零部件产品和智能汽车用丝杠产品领域合作的创新机会。
资料来源:浙商证券
二、谐波减速器——轻负载部位的关键传动部件
谐波减速器以其体积小、质量小、传动比大、运动精度高等优点,在人形机器人的小臂、腕部、手部等轻负载部位得到广泛应用。特斯拉人形机器人全身共有14个旋转执行器,百万台量产规模下谐波减速器的市场空间约为140亿元。
谐波减速器的性能主要受齿形设计、柔轮材料、工艺流程等因素影响。国内厂商与海外厂商在这些方面存在一定差距,但包括美湖股份、隆盛科技、绿的谐波、中鼎股份等在内的企业已在谐波减速器领域积极布局,通过投资并购、产能扩张等方式提升竞争力。
上市公司布局情况:
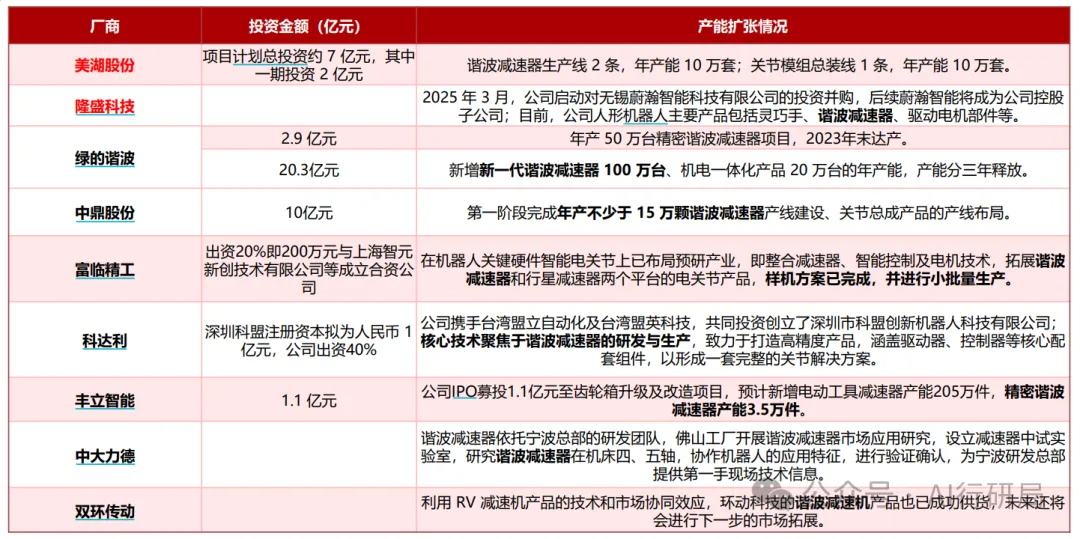
美湖股份:投资7亿元建设谐波减速器产线,年产能10万套。
隆盛科技:2025年3月启动对无锡蔚瀚智能科技有限公司的投资并购,后续蔚瀚智能将成为公司控股子公司;目前,公司人形机器人主要产品包括灵巧手、谐波减速器、驱动电机部件等。
绿的谐波:新增新一代谐波减速器 100 万台、机电一体化产品 20 万台的年产能,产能分三年释放。
资料来源:浙商证券
三、电机——机器人的动力源泉
电机在人形机器人中扮演着至关重要的角色,其中无框力矩电机(旋转关节)和空心杯电机(灵巧手)应用较为广泛。无框力矩电机具有体积小、功率高、低转速输出大扭矩等特点,是特斯拉 Optimus 人形机器人的关节执行器的核心动力来源,单台 Optimus 需 28 个;而空心杯电机因其节能特性、灵敏的控制特性和稳定运行特性,成为灵巧手驱动装置的首选单台需34个。
浙商证券测算,在百万级机器人量产规模下,无框力矩电机和空心杯电机的市场规模分别可达280亿元和204亿元。包括步科股份、伟创电气、禾川科技等上市公司在无框力矩电机领域积极研发和布局,鸣志电器、鼎智科技、兆威机电等企业则在空心杯电机领域积极布局。
布局无框力矩电机上市公司:
步科股份:公司推出了适用于机器人的多种产品,如协作机器人专用无框力矩电机等,在人形机器人的旋转关节和直线关节等部位有应用潜力,但具体的大规模成熟应用案例可能还在不断发展和积累中。
伟创电气:公司是一家从事工业自动化产品研发、生产、销售于一体的高新技术企业,预计投入12,00万元研发无框力矩电机,产品综合性能对标科尔摩根,在机器人等行业中得到应用。
禾川科技:2024年5月发布的hu-mdb系列无框力矩电机,具有低温升、高效率、高性能特点,且进行了轻量化、紧凑化设计,可满足人形机器人所需各关节空间。
雷赛智能:2023 年底成功研发出高密度无框力矩电机等核心产品,具有高功率密度、高精度、高可靠性等特点,适用于对电机性能要求较高的人形机器人等应用场景。

资料来源:浙商证券
布局空心杯电机上市公司:
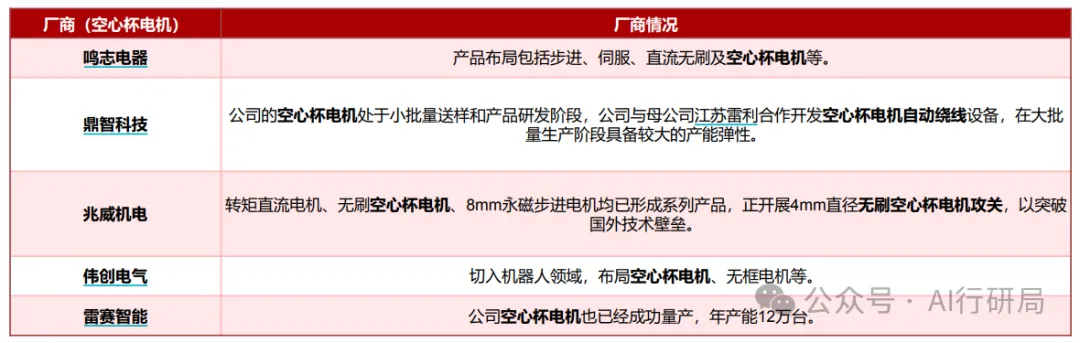
兆威机电:转矩直流电机、无刷空心杯电机、8mm永磁步进电机均已形成系列产品,正开展4mm直径无刷空心杯电机攻关,以突破国外技术壁垒。
鼎智科技:公司的空心杯电机处于小批量送样和产品研发阶段,公司与母公司江苏雷利合作开发空心杯电机自动绕线设备,在大批量生产阶段具备较大的产能弹性。
四、灵巧手——任务执行的“神经末梢”
灵巧手是执行精细操作的关键,核心组成部分为驱动、传动和感知三大系统。驱动系统为灵巧手提供动力和扭矩,相比于传统直流电机,无铁芯的空心杯电机体积小、响应速度快、精度高,是灵巧手驱动装置首选。
传动系统将驱动系统的动力传递到末端执行器,传动方案以以连杆、腱绳为主。腱绳传动模拟人手的肌腱结构,线绳传动使得大型的驱动器远离了执行机构,减轻了末端的负载和惯量,提升了抓取的速度。
感知系统负责实时监测灵巧手的状态。感知系统大致分为内部和外部两类,内部主要包括力及力矩传感器于捕捉关节的位置信息和转动角度等数据;外部传感器包括触觉传感器等,用于探测物体和灵巧手之间的相对位置等多方面信息。
国内厂商如因时科技、宇树科技、智元机器人、兆威机电等已推出多自由度仿生手。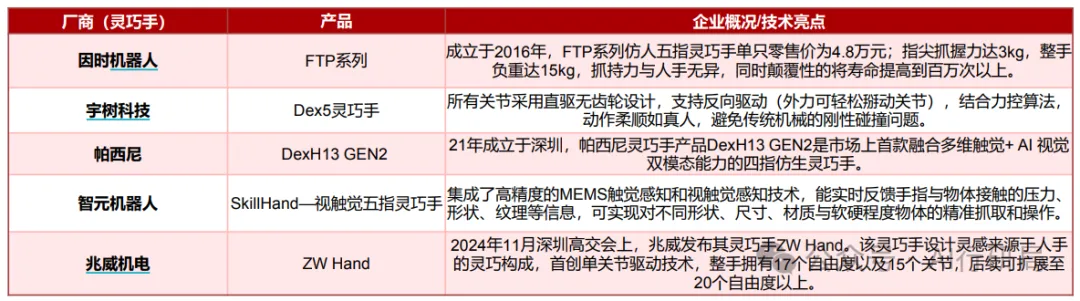
东吴证券认为,目前灵巧手各方案均有优劣。其中,腱绳方案最类人,且因为仅有5-6个主动自由度,成本相对较低,但腱绳方案的问题在于蠕变和寿命问题,且腱绳方案在算法层面难以解耦;目前全直驱灵巧手性能最佳,且自由度很高,但因为全部为主动自由度,需要20多个电机模组,短期降本较难,难以产业化;连杆方案搭配丝杠能够相对兼顾性能和价格。未来灵巧手方案也不会是唯一方案,针对不同场景方案应有差异。