这次英伟达 GTC 至简动力 CEO 贾鹏海报用的还是理想时期的照片,
去年这时候他代表理想汽车在 GTC25 分享了 VLA 自动驾驶相关的内容,
时隔一年,贾鹏已投入机器人创业大潮,创立至简动力,带来了最新成功。
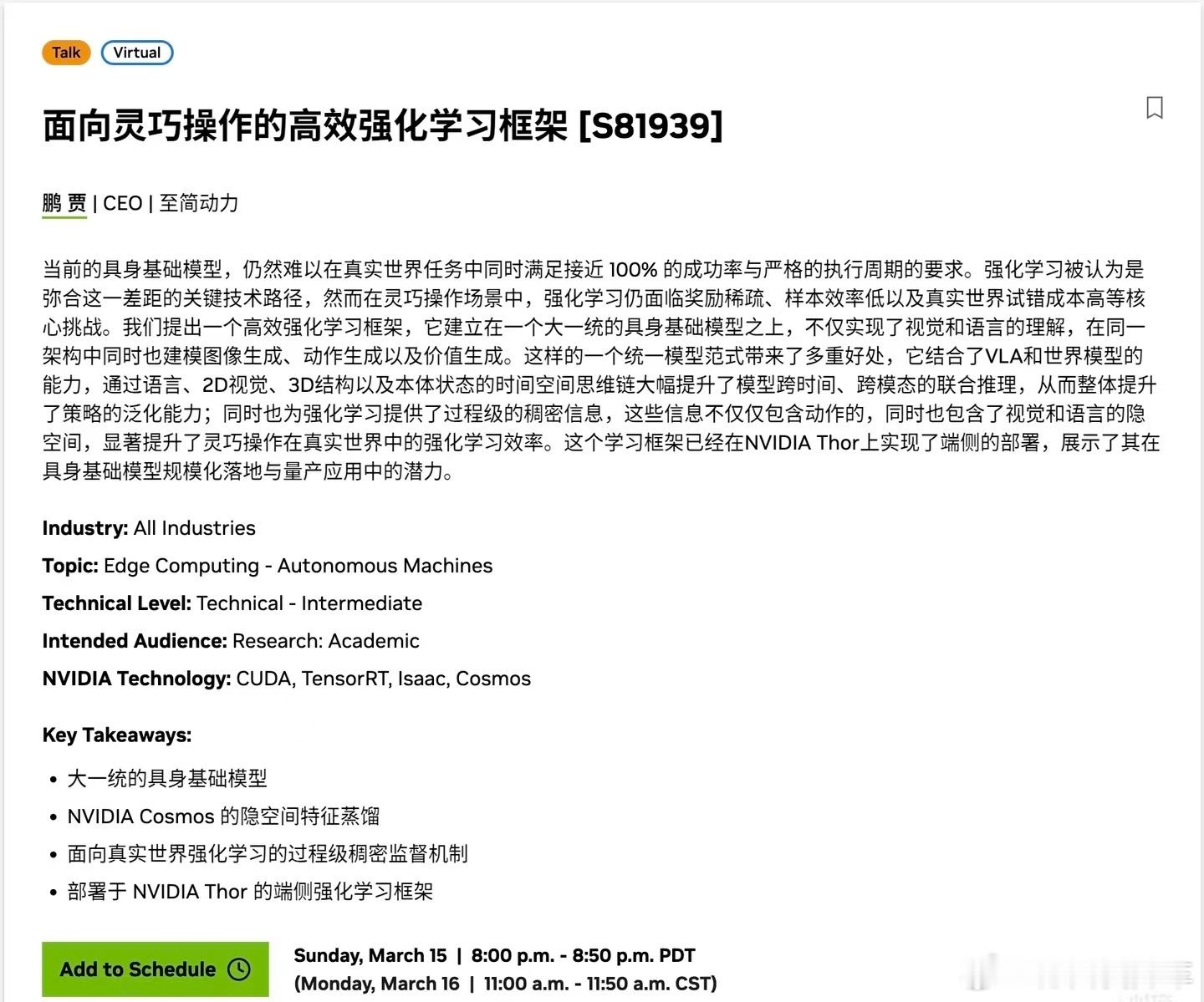
这一次,他带来的内容主题为「面向灵巧操作的高效强化学习框架」:
当前的具身基础模型,仍然难以在真实世界任务中同时满足接近100%的成功率与严格的执行周期的要求。
强化学习被认为是弥合这一差距的关键技术路径,然而在灵巧操作场景中,
强化学习仍面临奖励稀疏、样本效率低以及真实世界试错成本高等核心挑战。
至简动力团队提出一个高效强化学习框架,它建立在一个大一统的具身基础模型之上,
不仅实现了视觉和语言的理解,在同一架构中同时也建模图像生成、动作生成以及价值生成。
这样的一个统一模型范式带来了多重好处,它结合了VLA和世界模型的能力,
通过语言、2D视觉、3D结构以及本体状态的时间空间思维链大幅提升了模型跨时间、跨模态的联合推理,从而整体提升了策略的泛化能力;
同时也为强化学习提供了过程级的稠密信息,这些信息不仅仅包含动作的,
同时也包含了视觉和语言的隐空间,显著提升了灵巧操作在真实世界中的强化学习效率。
这个学习框架已经在NVIDIA Thor上实现了端侧的部署,展示了其在具身基础模型规模化落地与量产应用中的潜力。
GTC26具身智能人形机器人