英文题目:Monopedal robot branch-to-branch leaping and landing inspired by squirrel balance control
中文题目:松鼠启发单足机器人实现树枝间跳跃与平衡着陆
作者:Justin K. Yim¹(通讯), Eric K. Wang¹, Sebastian D. Lee¹, Nathaniel H. Hunt², Robert J. Full³, Ronald S. Fearing¹(通讯)
作者单位:¹加州大学伯克利分校;²内布拉斯加大学奥马哈分校;³加州大学伯克利分校
期刊:Science Robotics(IF 27.5,中科院一区,JCR一区)
发表时间:2025年3月19日
链接:https://www.science.org/doi/10.1126/scirobotics.adq1949
引文格式:Yim J K, Wang E K, Lee S D, et al. Monopedal robot branch-to-branch leaping and landing inspired by squirrel balance control[J]. Science Robotics, 2025, 10(100): eadq1949.
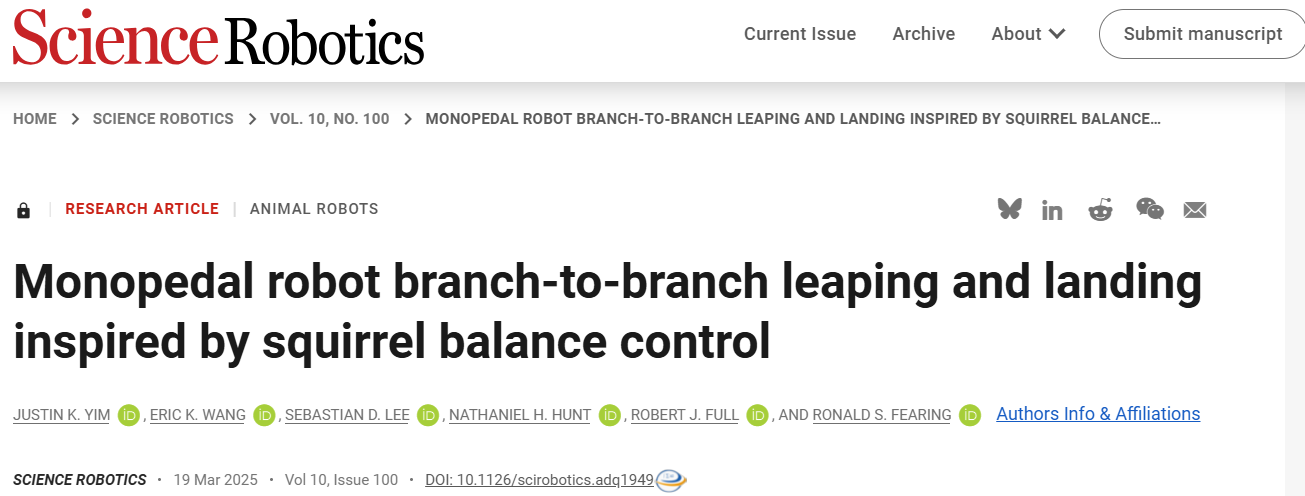
01 文章介绍在树栖环境中跳跃着陆,对腿式机器人而言是巨大的挑战。立足点极细,无法产生足够的抓握力矩来稳定身体;传统平衡策略(如调节落脚点、施加扭矩)在此基本失效。然而,松鼠却能轻松做到。它们缺乏灵长类那样的强抓握力,但着陆极少失败。这背后的力学奥秘是什么?
近日,由加州大学伯克利分校Ronald S. Fearing教授与Justin K. Yim博士带领的团队,在国际权威期刊《Science Robotics》上发表了突破性进展。该工作从松鼠的着陆行为中获得灵感,揭示了其在细小树枝上实现动态平衡的核心秘诀——径向力控制(即着陆时主动伸缩腿部调节质心位置)。团队将这一策略成功应用于单足机器人Salto-1P,首次实现了机器人在可忽略抓握扭矩下的树枝间跳跃与直立平衡着陆。这项研究不仅为腿式机器人在稀疏地形上的运动提供了全新的控制范式,更通过其简洁优雅的物理模型,解释了动物敏捷性背后的深层力学原理。
02 突破传统平衡范式:一个被忽视的维度让机器人在稀疏地形上保持平衡,长期面临“莫拉维克悖论”式的困境——机器能在复杂的棋类游戏中取胜,却难以在细枝上完成一次稳定的着陆。相比平地行走,树枝着陆的核心难点在于:立足点极细,无法产生足够的抓握力矩来稳定身体。传统平衡控制器(如反作用轮、多足力分配)主要侧重于调节垂直于支撑面的力和扭矩来控制姿态,但在小直径树枝上,这些控制能力因力臂狭窄而严重受限。
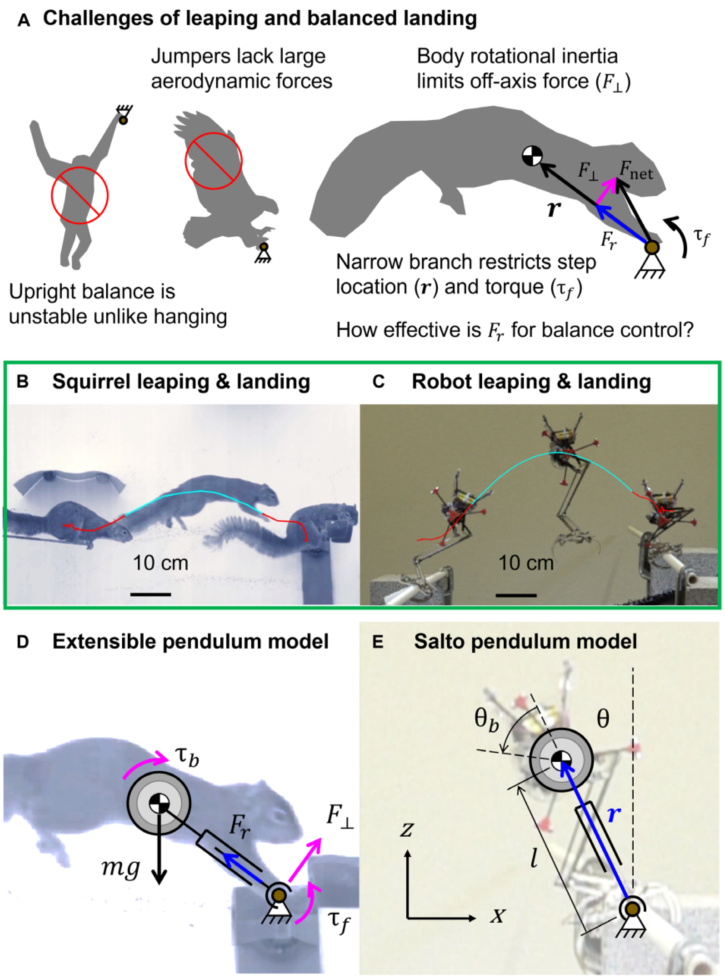
图 1. 在稀疏地形上跳跃和着陆。
然而,松鼠却能轻松应对。它们缺乏灵长类那样的强抓握力,但着陆极少失败。此前研究多归因于其灵活的尾巴或肌肉控制,但本研究给出了一个更底层的物理解释:松鼠在主动调节腿部径向力——即沿着腿部方向、指向或远离重心的力。
针对以上挑战,该研究团队转向借鉴松鼠的神经力学原理。松鼠的肌肉骨骼系统能够在高速着陆时快速调节腿部长度,从而改变质心到支撑点的距离。受此启发,团队设计了一种基于径向力控制的平衡策略,并将其与传统的扭矩控制相结合,构建了一个完整的理论框架。
该框架的核心是可伸展反作用轮倒立摆模型。在预训练阶段,系统通过分析松鼠的真实着陆数据,学会了推断不同初始条件下应施加的径向力与扭矩组合。这使得机器人在触地瞬间,即使没有精确的抓握力矩,也能通过腿部伸缩“软化”或“硬化”着陆冲击,为后续的精确控制打下坚实的动力学基础。
03 核心创新一:径向力控制策略该研究的首要任务是构建机器人利用径向力进行平衡控制的理论基础,其关键在于从松鼠的行为中学习一种通用的控制律。现有方法通常将平衡问题简化为调节扭矩或落脚点,然而对于自由度极高的单足机器人而言,这种简化在稀疏地形上常因控制能力不足而失效——机器人难以在高速着陆中仅凭扭矩就稳住身体。
为突破这一瓶颈,团队设计了一套基于“过头/不足”预测的“砰砰”控制律,利用松鼠的真实着陆数据进行验证。在该框架中,径向力与有效扭矩被作为两个独立但互补的控制维度。
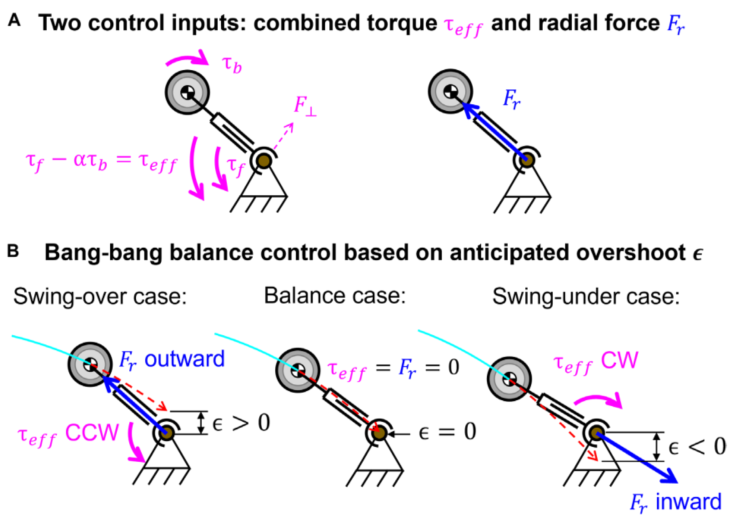
图2: (A) 着陆器仅能使用径向力和有效扭矩控制平衡;(B) 基于预期“过头量”的“砰砰”控制律。
其中的关键创新是引入了径向力的双重物理意义:
-力学效应:通过伸缩腿长,改变质心到支撑点的距离r,动态调整绕支撑点的转动惯量。正的 F_r(蹬直腿)增加转动惯量,减速摆动;负的F_r(收腿)减小转动惯量,加速摆动。
-动力学等效:在倾斜角下施加F_r会产生水平分力F_x,可直接作用于水平速度。
与以往仅依赖扭矩控制的模型不同,引入径向力控制令机器人的平衡能力实现了突破。扭矩负责直接调节角动量,而径向力则通过改变系统惯量间接影响角速度。当两者在控制律内融合时,扭矩回答“转多快”,径向力则明确指示“如何调整惯量”,二者互补形成对动态平衡的完整调控。这也从计算角度阐释了松鼠何以能在细枝上稳定着陆——径向力足以支撑其构建出动态的平衡策略。
此控制律的突出优点在于其简洁性与强迁移性。它无需复杂的系统辨识,仅基于对“过头/不足”的二元判断即可生成控制指令。尽管松鼠和机器人的机械结构存在差异,但基于“平衡事件”学习到的控制逻辑具有跨平台泛化能力。通过观察松鼠如何调节腿长来应对不同着陆条件,机器人以完全自监督的方式学会了聚焦于平衡的关键——质心相对于支撑点的运动轨迹。
图3:松鼠(左)和机器人(右)的驱动空间与不同控制策略下的可平衡区域。
模型预测显示,结合径向力控制后,松鼠的可平衡初始条件范围扩大了470%,机器人则扩大了230%。这意味着,原本会导致“过头”或“不足”失败的着陆条件,现在可以被成功平衡。
04 核心创新二:被动“笼式”抓爪硬件设计在具备强大的平衡控制策略后,研究面临的核心挑战转向如何让机器人在高速着陆时可靠地抓住树枝,同时又不干扰后续的平衡控制。传统抓爪设计往往追求高抓握力或高摩擦,但这会引入难以预测的扭矩干扰,反而破坏了径向力控制的纯净性。
为解决上述问题,团队设计了一种非驱动的被动“笼式”抓爪(总重仅11.6克)。其核心设计哲学是:刻意最小化抓握扭矩,将“抓住”和“平衡”两个问题完全解耦。
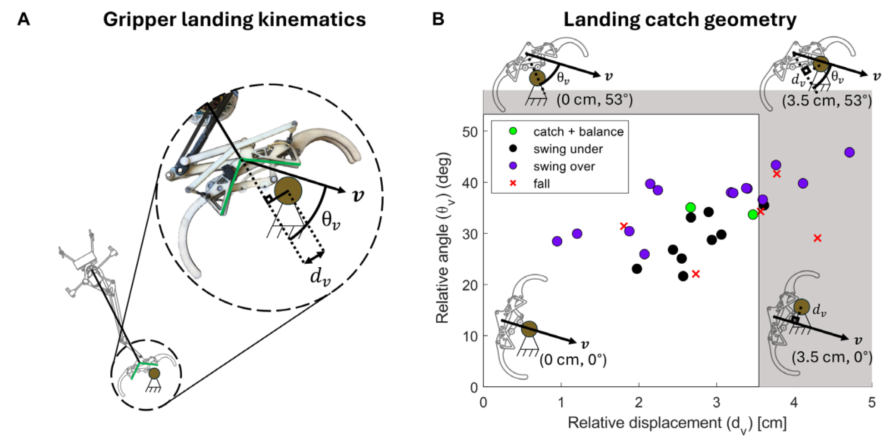
图4:抓爪设计及30次着陆试验的触地运动学分布。
抓爪的创新之处体现在三个方面:
1. 几何锁定机制:采用瓦特II型六杆机构,当树枝接触触发连杆时,机构会自动“笼住”树枝,通过几何约束而非摩擦或夹持力保持接触。这种设计确保了抓爪在径向方向上的自由度不受限制,允许腿部自由伸缩。
2. 低摩擦接触界面:触发连杆上安装有滚轮,当抓爪相对于树枝旋转时,滚轮提供滚动接触,将滑动摩擦降至最低。这保证了机器人摆动时,抓爪不会对树枝施加额外的扭矩干扰。
3. 与腿部运动的解耦:抓爪的解锁与腿部伸展运动耦合——当机器人起跳时,腿部伸直到达预定距离会自动触发抓爪打开;而在着陆阶段,抓爪的闭合完全由冲击触发,与腿部控制无关。这种设计使得平衡控制可以独立进行,无需担心抓爪状态。
在30次实验中,该抓爪实现了83%的抓握成功率。90%的触地点位于抓爪几何设计的理论可抓握范围内,证明其覆盖了发射精度所导致的着陆偏差。5次失败多源于平面外扰动(如滚动)或复杂的冲击反弹,超出了当前简单几何模型的范围。与松鼠高度灵活且柔顺的四肢相比,Salto的非驱动、刚性抓爪适应性虽然有限,但已足以验证径向力控制策略的可行性。
05 核心创新三:可伸展倒立摆模型与验证一个优秀的理论模型不仅要能解释已知现象,更要能预测未知情况,即具备强大的解释力和泛化能力。该研究通过一系列严苛的模型-实验对比,全方位展示了所提出的可伸展反作用轮倒立摆模型在解释松鼠行为和预测机器人性能方面的巨大优势,揭示了径向力控制对于动态平衡的决定性作用。
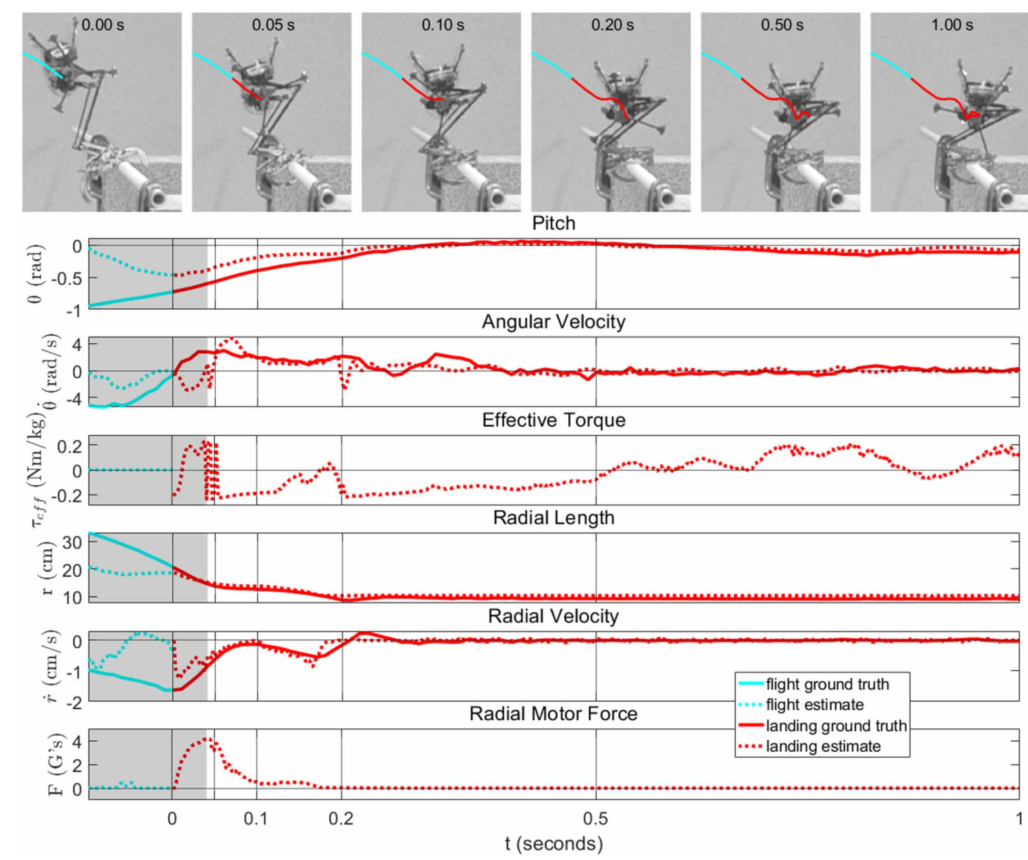
图5:Salto第13次试验的平衡着陆过程,展示径向力调节与最终稳定。
机器人实验验证:径向力单独作用的边界
在30次机器人跳跃实验中,团队刻意在着陆初始阶段仅启用径向力控制(反作用轮禁用),以测试其单独作用的效果。结果显示,所有实验的初始条件(角度、角动量)均落在模型预测的“仅径向力可平衡”狭窄区域内(图6D蓝色区域)。这解释了为何实验中仅成功2次——因为该区域本身非常狭窄,对初始条件要求苛刻。但恰恰是这两次成功,证明了径向力控制本身足以在关键阶段稳定机器人。模型同时预测,若采用“径向力+扭矩”的混合控制策略,可平衡区域将扩大230%,暗示若能实现更快的径向力响应和更大的有效扭矩,机器人的成功率有望大幅提升。
松鼠数据验证:模型的普适性
将文献中48次松鼠跳跃着陆的数据点(包含成功与失败)与模型预测的三种控制策略的可平衡区域进行对比(图3C)。结果显示,松鼠的实际着陆数据点几乎全部(48中46)落在模型预测的“径向力+扭矩” 的绿色可平衡区域内。这一高度吻合验证了所提出的可伸展摆模型及径向力控制理论在解释动物卓越平衡能力方面的准确性。它也表明松鼠很可能在自然界中正是巧妙地结合了这两种控制策略。
下表展示了不同控制策略下松鼠和机器人的可平衡区域范围对比,清晰地体现了径向力控制的优势:

从数据中可以直观地看到,单独使用径向力或扭矩都有其局限,但二者结合时,可平衡区域实现了质的飞跃。这证明了在多任务学习中,不同控制维度的互补性能够产生强大的协同效应。
06 总结与展望加州大学伯克利分校团队的这项发表于《Science Robotics》的研究,为腿式机器人在稀疏地形上的运动控制提供了一个极具参考价值的范式。它打破了长期以来对于“动态平衡必须依赖强抓握力或高精度扭矩控制”的迷思,证明了实现复杂着陆平衡并不一定需要复杂的硬件,关键在于如何利用“物理智能”,即通过简洁的力学模型和策略,来挖掘机器人本体驱动能力的价值。通过模拟松鼠的径向力调节机制,机器人首次在可忽略抓握扭矩的条件下展现出了类生物的平衡能力。
该研究的几大核心突破点总结如下:
1、策略:首次明确提出并验证了径向力控制((F_r))在动态平衡中的关键作用,将其与传统扭矩控制并列,构建了完整的平衡控制理论框架。
2、新硬件:设计了轻量化被动“笼式”抓爪,巧妙地将“抓取”与“平衡”解耦,为验证径向力控制提供了纯净的实验平台。
3、新模型:提出了可伸展反作用轮倒立摆模型,并以简洁的“砰砰”控制律实现了对复杂动态行为的精准描述,模型预测与松鼠真实数据高度吻合。
4、概念验证:首次在单足机器人Salto-1P上实现了树枝间跳跃后的直立平衡着陆,证实了该策略的物理可行性。
这一成果不仅在学术上拓展了动态平衡控制的边界,更在工程上为未来在废墟搜救、管道检测、树栖环境监测等场景中作业的敏捷机器人提供了可行的技术路径。随着腿式机器人向更复杂环境进军,赋予机器人类似的“本能”平衡能力已成为行业共识。伯克利团队的这一方案,无疑为让机器人走出实验室,像松鼠一样在复杂地形中自由运动奠定了重要基础。
未来研究将聚焦于以下几个方向:
1、破解跳跃功率与径向力控制带宽之间的设计权衡(串联弹性驱动利于储能,但牺牲响应速度)。
2、将二维平面策略拓展至三维空间,并应用于多足机器人。
3、深入探究碰撞与能量耗散在着陆平衡中的作用,进一步完善理论模型。