卓驭科技的「成行平台」也上端到端了,将会在宝骏云海上首发搭载。
(原大疆车载改叫卓驭科技)
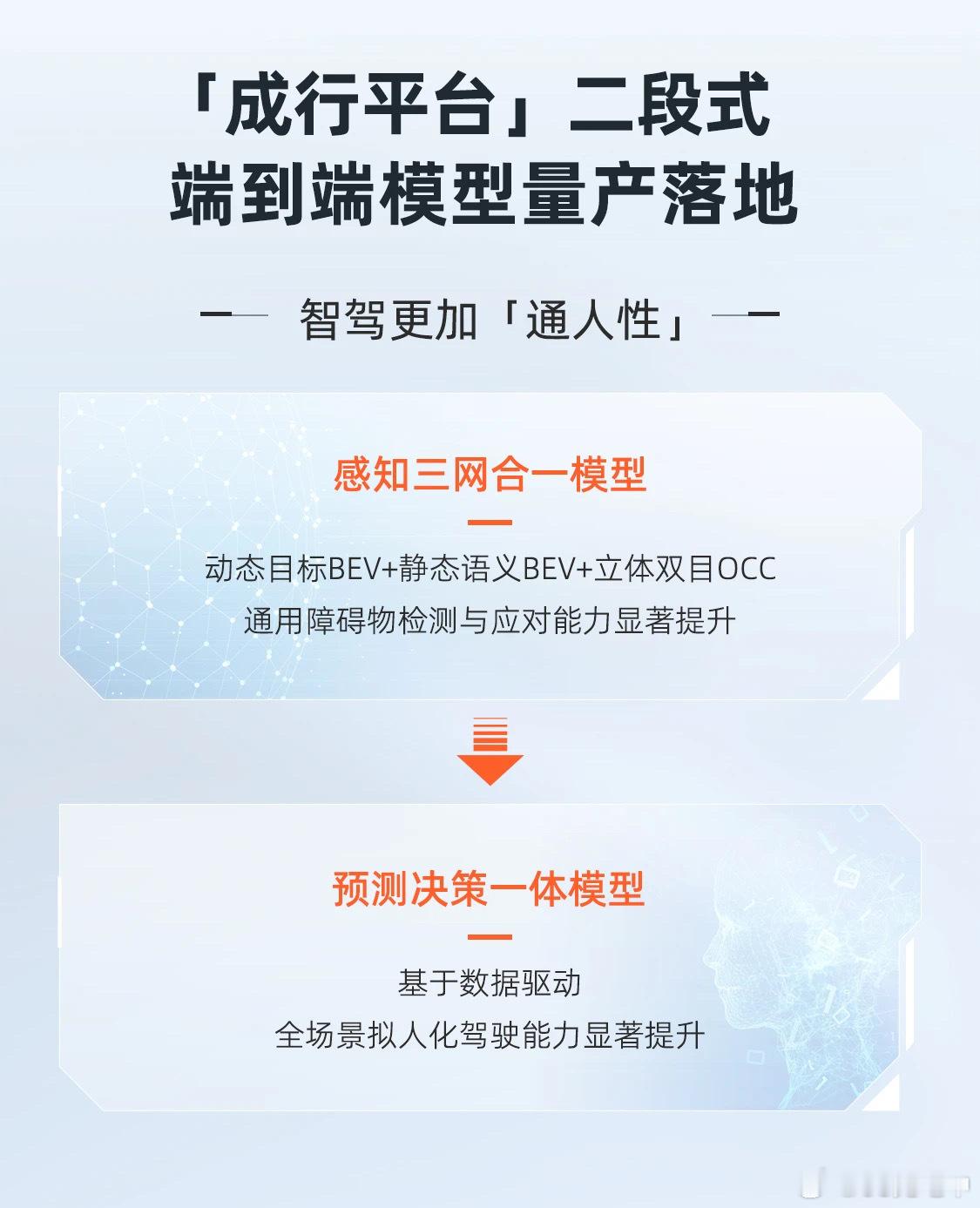
这个端到端和小鹏华为的比较类似,都是两段式的端到端,感知是一个模块,规控是一个模块(后续也会往 One Model 发展)。
在卓驭这,感知原来是动态目标 BEV + 静态语义 BEV + 立体双目 OCC 三个网络,现在整合成了一个网络;规控也整合成了一个预测决策一体模型。
根据官方介绍,应用二段式端到端模型后,「成行平台」的城区绕行能力,高速上下匝道通行能力,以及对锥桶、水马、异形车辆、道路施工现场等通用障碍物的应对能力都有显著提升。
另外也会将绕行能力、红绿灯识别启停和根据车流智能调速等功能下放至基础智能行车辅助上。
这个车的硬件应该是和云朵上的一样,7V + 32 T 的版本。
关于这套系统我比较好奇的点有 2 个:
1. 上了端到端之后,能力的提升很大程度上取决于训练的数据数量和质量,不知道现在卓驭这边积累得怎么样?现在这个用了多少 clips 参与训练。
2. 模型的迭代方式是怎么样的?卓驭如何让模型变得更好?