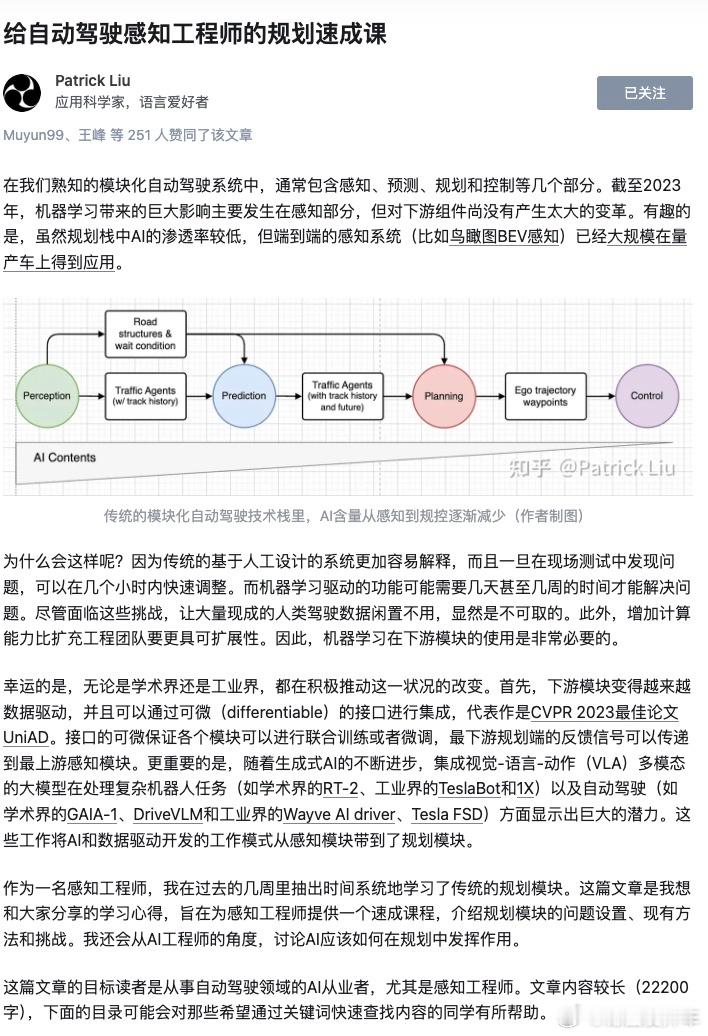
Patrick Liu 今天早上发布一篇 2.2 万字长文,
标题「给自动驾驶感知工程师的规划速成课」;
确实太干,对于大家来说只需要看这三部分,
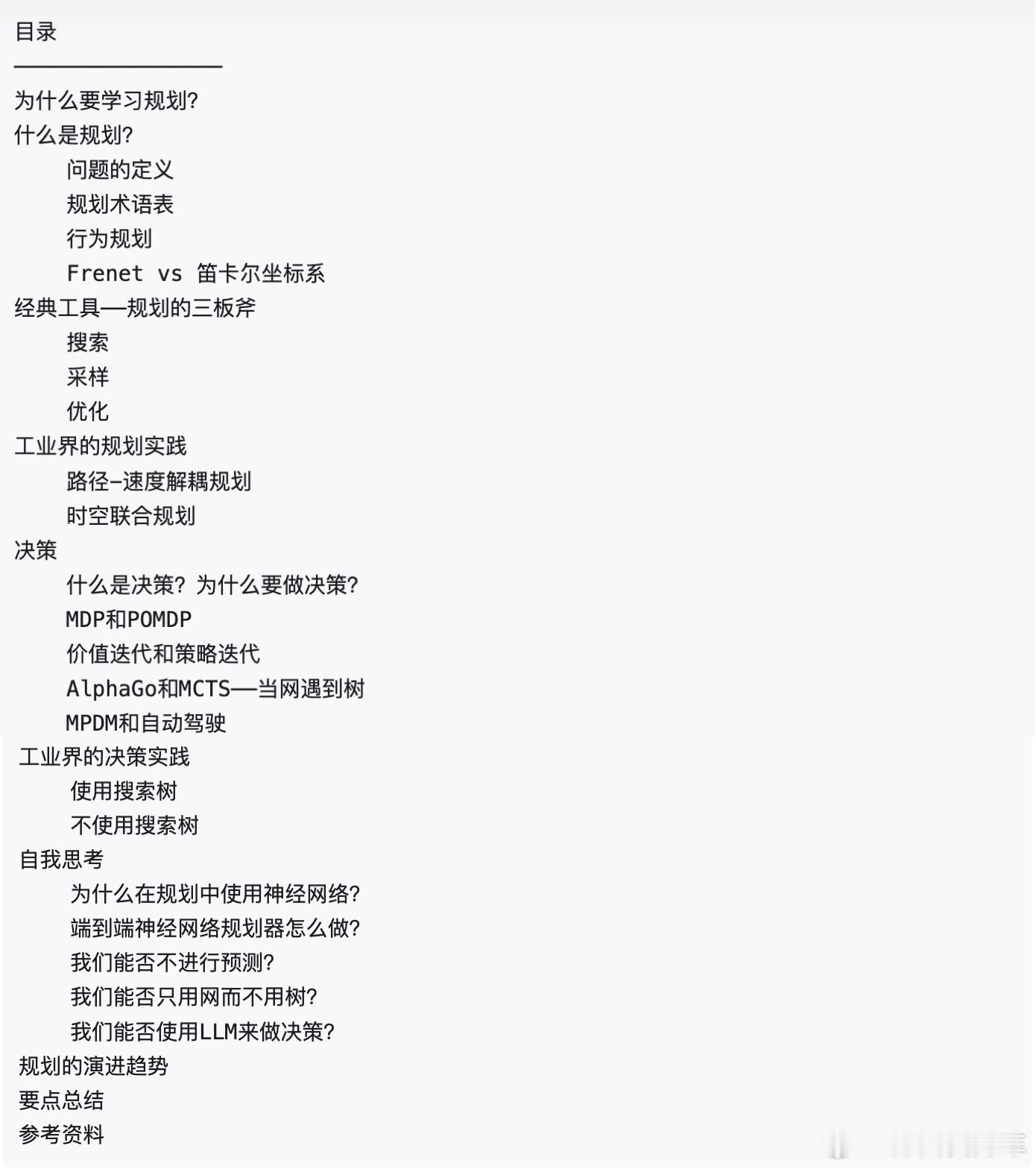
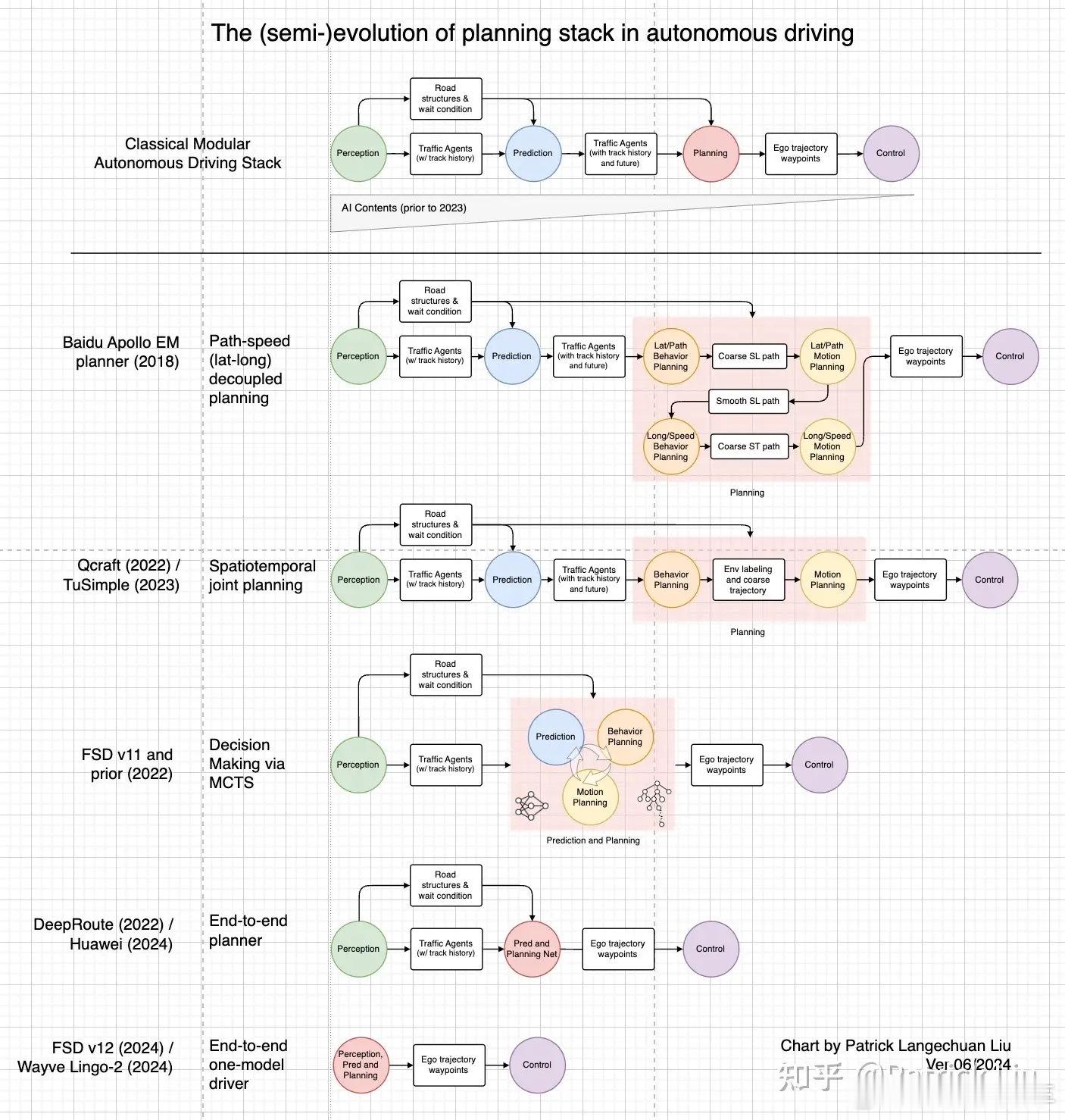
文章开头、目录大纲、自动驾驶规划演变图;
【要点总结】
机器学习作为工具:
机器学习是一种工具,而不是单独的解决方案。即使在当前的模块化设计中,它也可以辅助规划。
完整问题表述:
从完整的问题表述开始,然后做出合理假设以平衡性能和资源。这有助于为未来的系统设计制定明确的方向,并在资源增加时进行改进。回顾从POMDP的表述到AlphaGo的MCTS和MPDM等工程解决方案的过渡。
算法适应:
理论上美妙的算法(如Dijkstra和Value Iteration)对于理解概念非常有用,但需要为实际工程进行适应(Value Iteration到MCTS,如Dijkstra算法到Hybrid A-star)。
确定性 vs. 随机性:
规划在解决确定性(不一定是静态的)场景方面表现出色。在随机性场景中的决策制定是实现完全自主最具挑战的任务。
应急规划:
这可以帮助将多个未来合并为一个共同的行动。应急规划的积极程度应使你始终可以依赖备选计划。
端到端模型:
端到端模型是否能解决完全自主驾驶仍不明确。它可能仍需要经典方法如MCTS。神经网络可以处理助手任务,而树结构可以管理代理任务。
#汽场全开##新能源大牛说#