#纯视觉方案是更优解吗##一本书看懂智能网联汽车#
【纯视觉方案是更优解吗?】
纯视觉方案是智能驾驶的重要基础,我在我的《一本书看懂智能网联汽车》中就已经做过详细的介绍。
那么,纯视觉方案在自动驾驶领域是否是最优解,虽然我个人是比较支持这个方案的,但在圈内这个争议其实不小。
都知道,纯视觉方案有三个主要的优势:
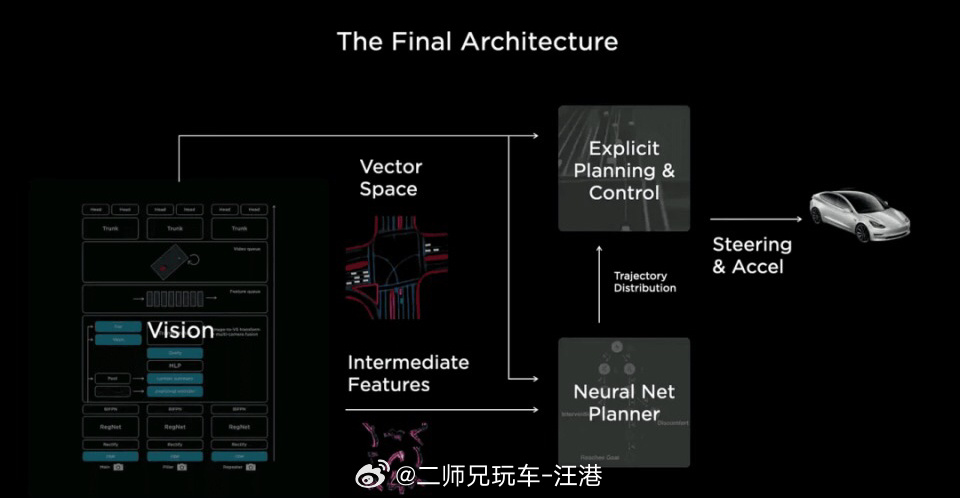
技术简化:纯视觉方案主要依靠摄像头等被动探测设备,不发射任何探测信号,不依赖雷达回波感知外部世界。这使得系统结构相对简单,降低了硬件成本和复杂性。
数据处理能力:随着深度学习技术的发展,纯视觉方案在图像处理和数据解析方面取得了显著进步。它可以通过单张照片帧进行高精度的深度估计,这比传统的激光雷达技术更为出色,后续AI的加持,可以说是潜力无限。
适应性强:纯视觉方案在复杂环境和动态场景中具有较强的适应性。通过不断优化算法和模型,纯视觉系统可以逐渐提高对不同环境和交通状况的识别和处理能力。
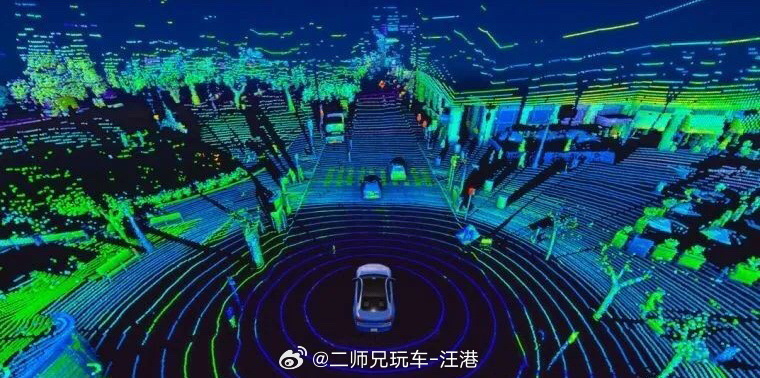
虽然纯视觉方案在图像处理方面取得了进步,但在三维空间感知方面仍存在局限性。激光雷达能够捕捉点云信息,获取物体的三维信息,而纯视觉方案则主要依赖于二维图像进行感知,这可能导致在某些复杂场景下感知精度不足。
还有就是在恶劣天气(如雨雪雾天)和极端光照条件下,摄像头的成像质量可能受到严重影响,进而影响纯视觉系统的感知能力。相比之下,激光雷达在这些条件下具有更好的稳定性和可靠性。
目前,纯视觉方案在算法和模型方面仍存在技术瓶颈。如何进一步提高算法的准确性和鲁棒性,以及如何处理多传感器融合等问题,都是当前纯视觉方案需要解决的关键问题。
因此,对于特定场景,在一些相对简单且固定的驾驶场景中(如高速公路、上下班道路等),纯视觉方案能够满足需求,并因其技术简化和成本优势而受到青睐。
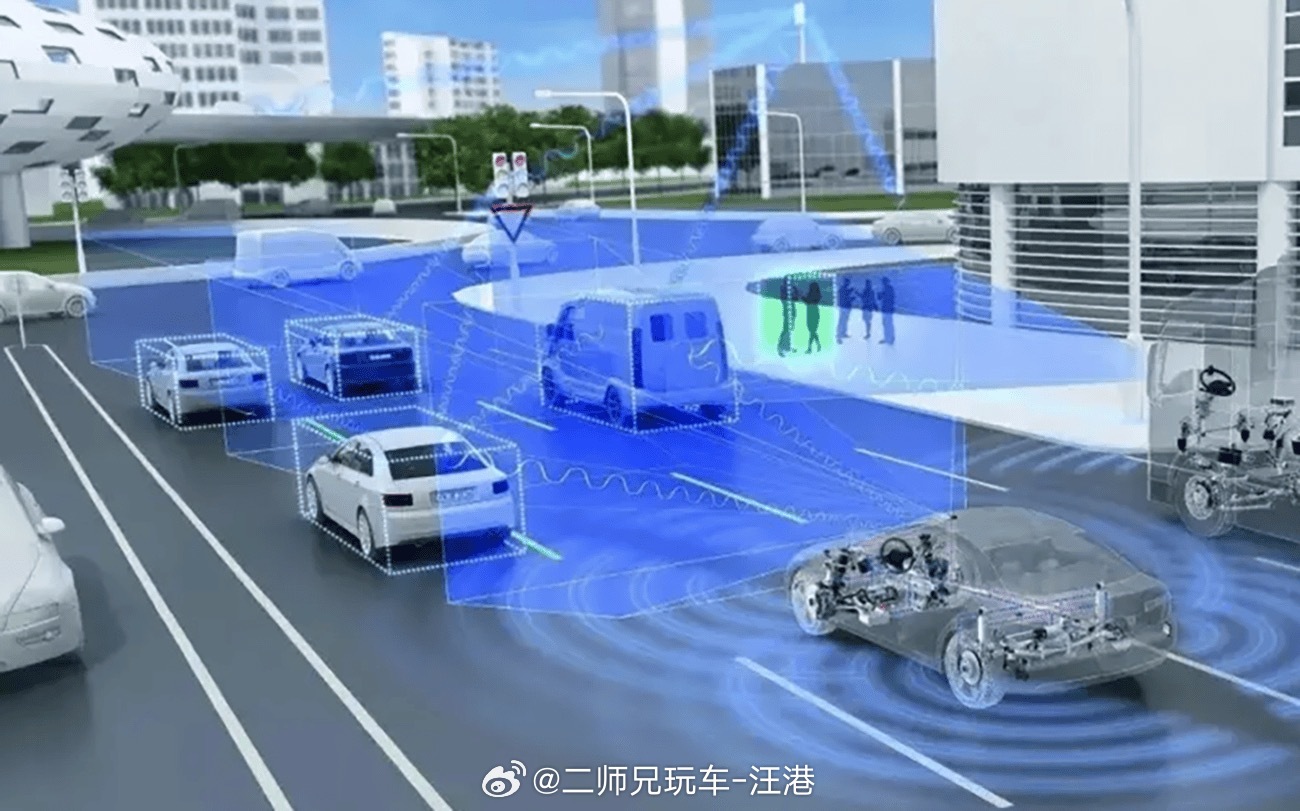
对于复杂场景:在复杂多变的城市交通环境中,纯视觉方案可能难以单独应对所有挑战。此时,结合激光雷达、毫米波雷达等多传感器融合的方案可能更为合适。
但我的观点还是不变,在未来,纯视觉未来用于中低端车,中高端车应该依然会带激光雷达;因为,按照摩尔定律,早晚有一天,激光雷达的价格会降下来,降到一个大家都能接受的程度,届时,基于激光雷达的特性所带来的辅助作用,咱为什么不要呢?