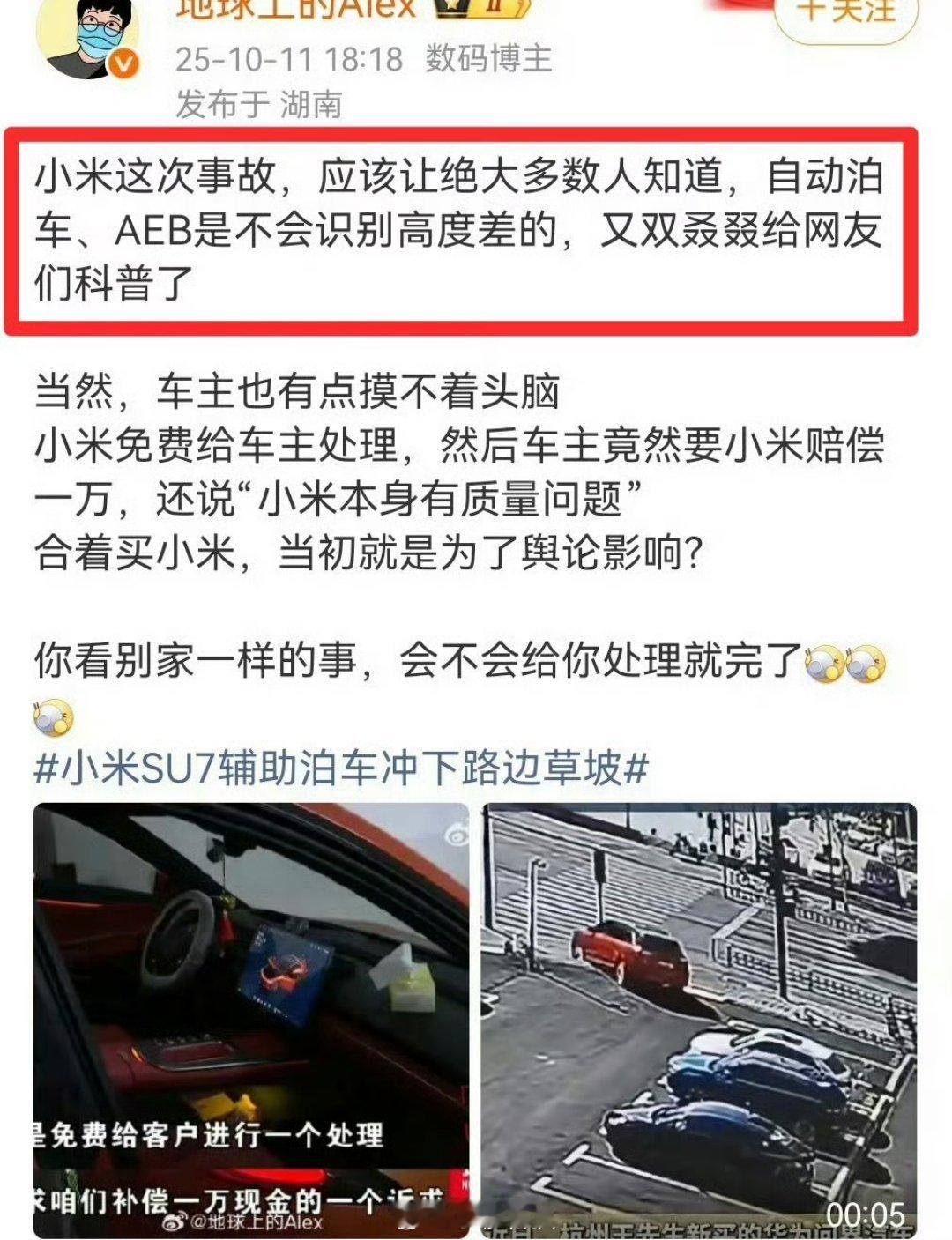
小米SU7辅助泊车冲下路边草坡
L4实现之前,无论辅助驾驶还是自动泊车都要驾驶员监控,尤其是在交通状况复杂和泊车位置特别时。
小米su7[超话]这次明显现场为有高度差的路面(草坡与道路存在落差),系统未识别斜坡并持续前行,导致车辆滑入草地。
视觉系统识别下坡草坪非常容易出现错误,对于激光雷达就简单多了。
su7这个明显,是靠视觉[笑cry]
强如vla的泊车,我每次都在旁边看着。

小米SU7辅助泊车冲下路边草坡
L4实现之前,无论辅助驾驶还是自动泊车都要驾驶员监控,尤其是在交通状况复杂和泊车位置特别时。
小米su7[超话]这次明显现场为有高度差的路面(草坡与道路存在落差),系统未识别斜坡并持续前行,导致车辆滑入草地。
视觉系统识别下坡草坪非常容易出现错误,对于激光雷达就简单多了。
su7这个明显,是靠视觉[笑cry]
强如vla的泊车,我每次都在旁边看着。
猜你喜欢

【29评论】【2点赞】

【10评论】【1点赞】



【147评论】【29点赞】

作者最新文章
热门分类
汽车TOP
汽车最新文章