聊两句辅助驾驶的时延问题,上一条我提到了"时延"对防御性驾驶的影响,其实它影响着辅助驾驶的方方面面。我们横评的考点,过和不过,往往跟时延有关:
感知"看晚了";轨迹输出“慢了”;轨迹够快,但控车“拉跨了”,这些都是常见的挂科原因。
减少时延,往往需要软硬件的共同努力,用更高算力的芯片,用更大的带宽都会得到改善。
但硬件只能治标,治本还需要在软件架构上来努力。
为什么行业更推崇一段式端到端?因为更纯粹的架构,也能有效降低时延。但在量产过程中,会遇到一些现实性问题。
国内如此内卷,不能按时交卷,不能交出稳定的产品,都是大忌,所以沿用更稳定的系统,或者做微创新,避免交卷的时候翻车。
所以,我们就看到了"一段式"加后处理、"一段式"横纵控制解耦的务实方案,这些在一定程度上,能保证性能稳定,不出大错,但在某些场景下,车会开得突兀,没FSD 那么丝滑。
你加的后处理越多,你的子系统越多,怎么可能降低时延呢?
那我们能做到FSD V14般的丝滑吗?我认为可以,放弃过去的方式,用更纯粹的架构,就能做到。
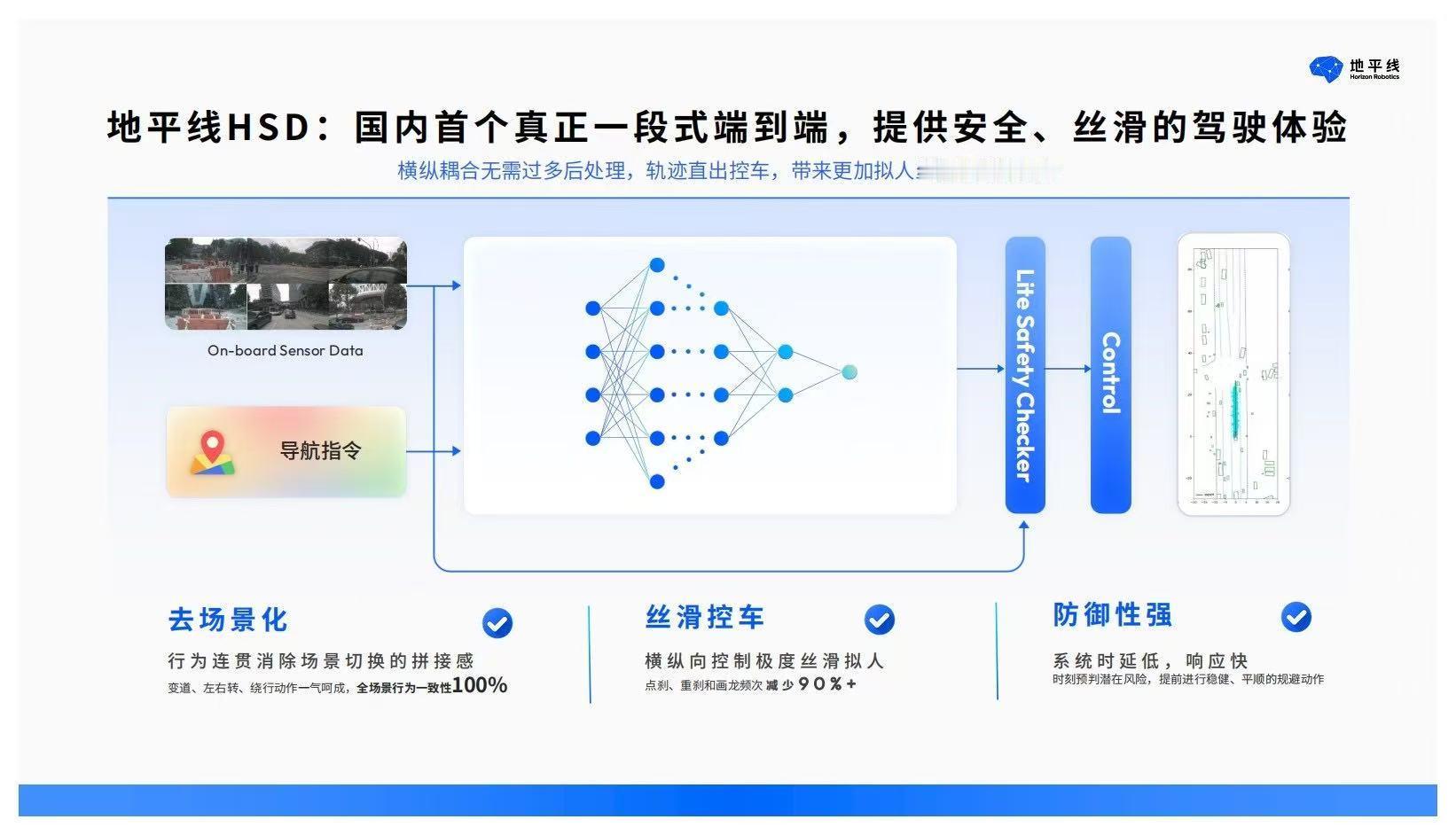
前端时间曝光度极高的地平线HSD,就是一个很好的例子。
据我所知:他们也经历过模型的内部赛马和选择,最终还是用了一段式端到端方案,而且是横纵联合训练的一段式端到端,极少的后处理。
所以很多体验过的媒体、主机厂、同行,都对HSD的控车赞赏有加,与FSD非常相似。
HSD的一段式、横纵联合训练的架构,让系统时延在100ms级,这是一个非常耀眼的指标。
那一段式端到端,相比VLA、世界模型是否落伍了呢?
其实这是三个完全不同的概念,并不是迭代演进的关系,端到端的下一代不是VLA,他们只是技术范式的不同。
一段式端到端同样可以通过云端的强化学习,在训练中引入VLM视觉语言模型,来达到多模态的效果。从而可以理解更复杂的驾驶场景。
所以HSD也可以解"潮汐车道"、文字标牌、文字红绿灯,理解防御性驾驶,而它的技术范式并不是VLA。
我之前说过,如果人为,把模仿学习为主的两段式(多段式)端到端、多个小模型的混合架构定义为端到端1.0时代。
那接下来,行业将进入到2.0,他是基于强化学习补强的:一段式端到端、VLA、世界模型,我们可以人为的叫他端到端2.0时代。
在这个时代,基于全数据驱动的AI能力,将决定最终的胜负。而此刻正是新与旧交割的时间节点。
中国的用户很幸运,我们不是一家独大的市场,还能看到不同方案的百花齐放,对实现最终自动驾驶的不同解法和路线。
不是每个人,都有机会见证和经历这一切。HSD一段式端到端体验






![俗话说得好,安全是最大的豪华。看看智界R7的表现[doge]车主亲证,智界R7被](http://image.uczzd.cn/13955458285776610321.jpg?id=0)
