特斯拉看起来是“快慢脑”系统,为了保证行驶的效率和流畅度,并不是时时刻刻都在使用“慢脑”。
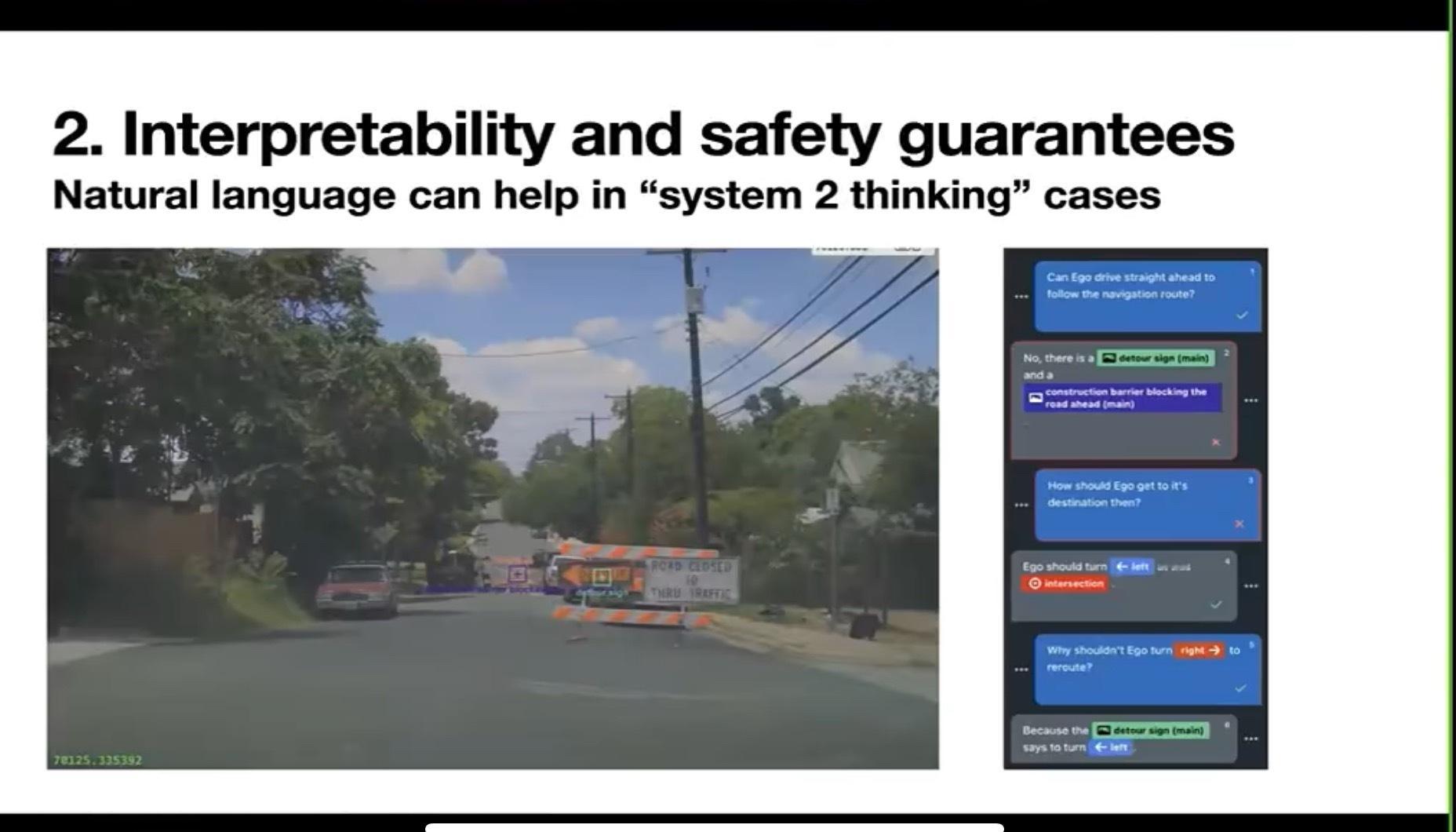
图示是特斯拉给出来需要仔细推理的场景,需要“L”来理解施工标牌上的文字信息。
而非必要情况下,这套系统就直接“VA”了。
*****************************************
以下是特斯拉的 AI team leader 在 ICCV 上的发言摘要
“其次,既然这是一个端到端系统。你们如何调试?你们实际上如何开发这个东西?如果出了问题,你们怎么知道?
仅仅因为它是端到端系统,并不意味着它不能预测其他东西。同一个模型可以被提示预测任意事物,包括3D占据栅格、其他物体、交通灯、交通标志、道路边界。甚至可以用自然语言。你可以问它为什么做出某些决定,它是否理解场景,等等?所有这些都有助于解释模型的理解,并在某种程度上为整个系统的安全性提供一些保证。所以在实践中,它看起来是这样的,你可以输入任意的传感器数据,并提示它产生任意的输出。但最终,在车上真正重要的是它产生的控制动作。其他一切都是辅助性的,但它们对于预测正确的控制动作非常有帮助。
就像我之前提到的,我们也可以使用自然语言与模型交互。同一个模型可以指向某些东西,解释它为什么做出某个决定。我们不需要所有这些来实时驾驶汽车。但如果你确实需要,你总是可以思考更长时间,产生推理标记,然后产生与整个推理一致的正确动作。同样,它可以是运行在车上的同一个模型,但根据情况,可以使用它或者直接产生控制动作。它不需要对每个细节都进行推理,因为如果你对每件事都进行详细推理,那么会花费太多延迟。但在需要的地方,它可以进行更长的推理以产生正确的答案。”